


瑞秋巴西化学家如何帮助使机器人更温柔的接触
最初的“机器人”从捷克剧作家Karel Capek在1921年的剧本罗莎的全能机器人没有我们今天知道的机电设备;他们是血肉。设想,他们远比今天的金属机器人,它被设计成做的事情我们觉得乏味,肮脏或危险,但不能看似简单的任务,比如拿水果。现在工程师,材料科学家和化学家关注于柔软的材料制成的机器如何有更好的控制和灵活性,并更好地与生物交互。
传统的机器人,由汽车和金属轴承,是伟大的任务,如点焊汽车,说乔纳森Rossiter软机器人小组的负责人,在英国布里斯托尔大学。但当涉及到生活在我们的世界,在这些大型可移动的金属物品在我们的生活中有点挑战性。“机器人很少与人类交互设计,但软材料可以改变这一点,他解释说。他们可以更像我们接触的东西,像狗或猫。
和许多设计挑战一样,自然是提供灵感。大象的鼻子。制成的软物质的形式150000块肌肉,它有能力推倒树木,也巧妙地操纵对象大小的花生。的生活发现了惊人的方式使用软物质的性质,”说奥林Velev北卡罗莱纳州立大学在美国,是谁设计的水凝胶材料,模仿肌肉的作用。”如果你真的比较与机械设备你可以做什么,即使是最简单的活的有机体,有一个很大的区别。生物是灵活,适应性强,他们可以自我修复。这真是一种功能,是离现在的技术,”Velev说。
软机器人执行机构
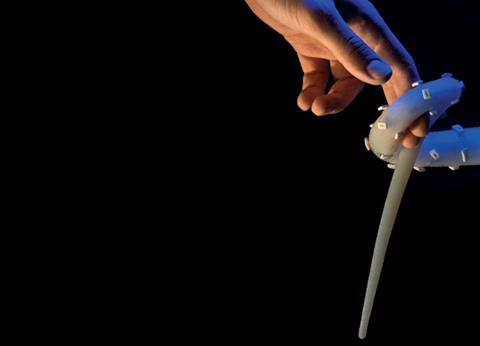
亚当·斯托克斯来自英国爱丁堡大学的同意,柔软的材料可以在机器人和开辟新的途径让我们更接近生物学所提供的功能。软机器人的一大挑战是寻找材料,可以像肌肉和提供驱动或运动,本质上是“兼容”。一个兼容的致动器不遵循一个严格的路径和响应。例如,柔性机器人爪可以抓住鸡蛋不碎。
使用气动迄今最先进的方法。斯托克斯曾在柔软的机器人团队哈佛大学的化学家乔治·怀特赛兹教授,这是做嵌入式气动网络(杀虫剂)的致动器由软橡胶聚合物。这些都是能够被拉长后恢复原来的形状,因为他们通常盘拉时分子理顺。嵌入的通道配置为创建一个特定的复杂运动的单一来源应用压力膨胀像气球。的结构组成,以及驱动组件,身体同一块材料使他们是非常轻量级的,”斯托克斯解释道。结构可以通过软光刻技术或生产相对便宜的3 d印刷,他们生产的小型爬行机器人没有内部的骨架。这个简单的动作可以产生复杂的运动——爬行和波动,灵感来自动物,像海星和鱿鱼。
的方法也被带到熊在挑选和包装精致的对象的问题,准确的重量,形状和位置都是事先不知道。传统的机器人发现这个困难。“你必须有这么多传感器和反馈,所以限制了速度你可以移动,”斯托克斯说。柔软的机器人,一个公司在2013年剥离出来,发展中Whitesides的适应软机器人基于杀虫剂的触手。软机器人执行机构已内置的遵从性,所以它不能损害(对象),您可以执行任务更快,”斯托克斯说。更高级的系统还提供机械的结合符合额外的传感器,允许更精确的控制他们的运动。
电活性材料
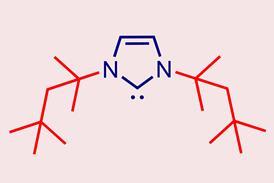
在布里斯托尔,Rossiter跨学科机器人实验室工作与各种电活性软材料创造内在驱动人造肌肉,引发的热、光、电或化学刺激。这包括介电弹性体驱动器的应用电压的材料导致压缩聚合物和形状的变化。理论上所有柔软、可伸缩的绝缘弹性体将以这种方式在某种程度上,但最好的驱动性能被发现在丙烯酸酯、硅树脂和聚氨酯。”这些是功率密度的优点——你离开多少“魅力”当你使用它们来提升或推动类似的东西——是为了生物肌肉,“Rossiter说。

另加是这些类型的材料可以作为自己的内置控制系统。'如果你把一些机械能,你得到的东西——它可能是一个pH值的变化也可能是一个电信号,所以他们工作作为传感器,“Rossiter解释道。你可以有相同的设备做一个驱动器,然后翻电路在某种程度上你可以感觉到,而不是外部传感器。
介电弹性体是大问题所需的驱动电压(数百到数千伏特)。Rossiter说减少的一种方法是使用分层的材料,每一层在并行工作。之间的一个平衡电压和每一层的厚度,我们要让这些事情尽可能薄,所以我们开始到10µm的尺度。生产这种材料的实际应用在软机器人需要数以百万计的层。有一些非常有趣的挑战在化学,如何使这一层一个相对简单的结构,变成一块材料真实的应用程序,“Rossiter说。他已经开始考虑如何自组织材料可用于薄层,以及石墨烯等材料。
Rossiter的项目创建耐磨软机器人是一个很好的实例字段可以提供什么以及如何软机器人很快就会融入我们的世界。£200万为期三年的工程和物理科学研究委员会资助的项目希望创建一个工具帮助老年人和那些行动困难的任务,比如爬楼梯或者走出一把椅子。这个想法是使用电活性聚合物的“第二皮肤”,Rossiter说。最简单的方法是有一条裤子,你可以穿上它会肌肉建立在外面和他们将工作与自己的肌肉来驱动你的腿。他们计划在2018年有一个原型。
水凝胶近似肌肉
生物启发领导Velev创建水凝胶为他柔软的致动器。水凝胶聚合物有能力持有大量的水在他们的三维网络,他们可以可逆地充满了大量应对外界刺激的变化,如温度、溶剂质量、pH值或电场。我们感兴趣的水凝胶,因为他们是第一次,诚然很粗糙近似的活组织,“Velev说,他指出,生物材料本身是至少50%的水。他认为这种兼容性可能最终帮助水凝胶机器人与人类直接接口。

设计的水凝胶驱动器Velev北卡罗莱纳和他的同事状态迈克尔·迪基作用于离子原则与生物学机制在起作用的一些相似之处。肌肉收缩是由细胞内钙离子水平,通过一个复杂的化学级联触发发布的神经冲动。Velev和迪基已经开发出一种方法来触发驱动称为ionoprinting的水凝胶,它使用一个铜电极注入铜离子。这些债券强烈羧基组聚丙烯酸钠水凝胶和导致交联的聚合物分子使材料更加激烈。针对特定区域,可以使水凝胶弯曲,可以逆转这个过程沉浸EDTA的凝胶。他们已经使用这种方法创造水凝胶镊子将铜离子注入可以弯曲的底部,并打开通过注入更多的镊子。
这些水凝胶驱动器到目前为止最大的问题是他们工作的速度,不能匹配生物肌肉的速度。Velev正在寻找其他进程可能会触发一个更快的水凝胶状态之间切换,但一个执行机构,需要15分钟是有限的使用。
一个聪明的解决方案正在开发使用嵌入式气动执行机构是使用气动腔内气体爆炸;权力从燃烧的碳氢化合物是一个艰苦的机器人主体,毕竟。怀特赛兹教授在哈佛的团队设计了一个系统,燃烧的甲烷和氧气产生爆发性的压力。这使得一个13厘米tripedal软机器人跳30倍的高度小于0.2秒。这种跳跃能力可能是有用的机器人需要跨越不平坦的地形,斯托克斯建议。“灾区之类的东西,你想要一个机器人,可以进去,是轻量级的,能够很快的穿过表面。”
神奇旅程

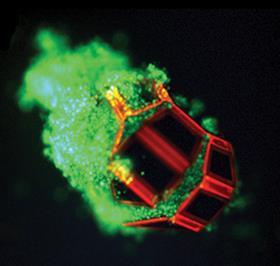
第一个小型软机器人来影响我们的世界可能会在医学上,根据大卫谢谢来自巴尔的摩的约翰霍普金斯大学的化学工程师,我们。他正在小软机器人外科手术和他的机器人微可以提供一个全新的方法来诊断癌症之类的疾病。灵活的1毫米的机械手是由水凝胶聚N-isopropylacrylamideco-acrylic酸)(pNI-PAM-AAc)。水凝胶的美丽与其他材料相比,膨胀和收缩可以很重要;这个大应变可以驱动驱动,说谢谢。水凝胶可以改变体积超过一个数量级,改变从water-solvated亲水状态在寒冷的气温中倒塌的疏水状态高于体温。
我们设想不仅医疗应用程序与一个钳子,但是,成千上万的他们,在这种情况下它会很难激励每一个与外部控制信号,所以我们希望当地环境触发动作,“谢谢解释道。他的水凝胶触手开始开放的星形状,但在更高的温度下在体内他们关闭了水凝胶脱水。谢谢发现他们工作更好地加强在地区non-swellable聚丙烯延胡索酸酯,它提供了一个严格的控制,这样他们就可以从体内小组织样本。他们也与氧化铁纳米粒子嵌入水凝胶,这样他们可以通过磁场引导部署和检索。
一群软机器人的想法对统计抽样在体内是临床医生非常有吸引力的,因为它可能会导致早期的疾病诊断。传统医学切片的工作方式是,通常你第一次看到一些使用核磁共振等成像模式,然后你去取病变组织的一个示例。但在疾病的早期阶段,你经常很难想象,这在医学统计活检取样引入了一个新的概念,说谢谢。最终的目标是能够取代许多目前入侵过程与生物可降解脱缰的柔软的机器人。的很长一段时间它是科幻的但是现在大量的人正试图使这成为现实,”他说。摘要已经成功测试了猪的胃肠道的活检。
柔软的机器人的世界
大多数方法软机器人看取代传统硬驱动器与柔软的替代品,但这还不是故事的全部。他们打开一个全新的功能,传统的机电系统不能做的,”Rossiter说。软材料在生物学中获取灵感,这包括改变表面形状、纹理和色彩,观察到的乌贼、章鱼和乌贼。例如,这些动物有能力改变他们的肤色通过扩大肌肉伸展小囊的黑色颜色。Rossiter复制效果使用电活性聚合物人造肌肉,与视图创建人工伪装。
软材料将改变我们与机器人互动,但如何接近他们会对我们的未来?他们能直接与生物系统接口吗?发现软机器人的执行机构,然后可以通过人体界面的控制是我最好的猜测的长期发展,”Velev说。他已经从柔软的水凝胶,可以创建简单的电路提供接口与人类大脑的一种方式。也许最接近我们结合动物和机器目前是组织工程人工水母在2012年由哈佛大学和加州理工学院的研究人员开发。游泳水母,水母的命名,是由薄硅膜培养大鼠心肌细胞和自由推动通过水。
柔软,很可能的致动器将创建机器人能够表现得更像自然生物。“如果你看一个工业机器人,它有相同数量的自由度为某人的胳膊,但你可以告诉它不是朝着一个生物的方式控制,”斯托克斯。他给的最新的崎岖的地形机器人的“大狗”“由谷歌设计波士顿动力公司。四腿铰接身上兼容的致动器,可以吸收冲击和回收能量从一个步骤。如果你看到它,它看起来生物,”斯托克斯说。软机器人将这甚至更有效,因为喜欢生物学,他们可以体现智能的——这意味着他们的运动和控制紧密集成在一个材料。
我们的未来与柔软的机器人可能不会太遥远,交互和Rossiter预计很快就会产生一个大众市场的产品,抓住了公众的想象力。但他说,创新新材料设计软机器人有可能改变更多。每一部分的我们的环境将会受到这些技术——你可能不是一个困难的刚性楼了。如果我们站着不动,地板涟漪你出门吗?材料化学家已设置的挑战。
瑞秋巴西总部位于英国伦敦,是一个科学作家吗








还没有评论